X. Yu,
D. Shishika,
D. Saldaña, and
M. Hsieh
"Modular Robot Formation and Routing for Resilient Consensus"
ACC 2020 - American Control Conference.
Abstract
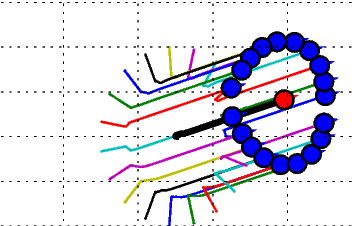
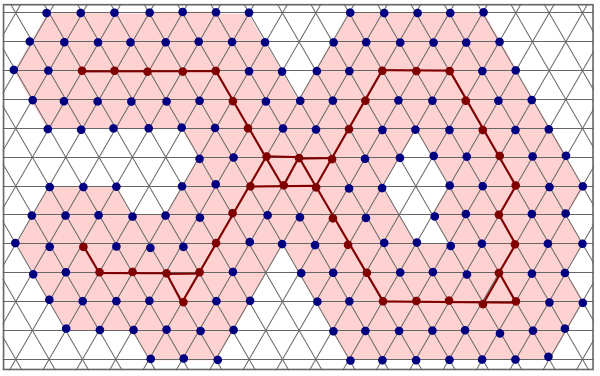
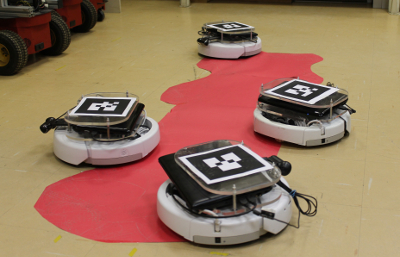
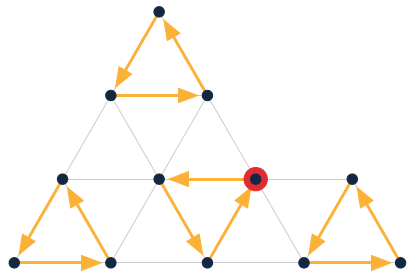
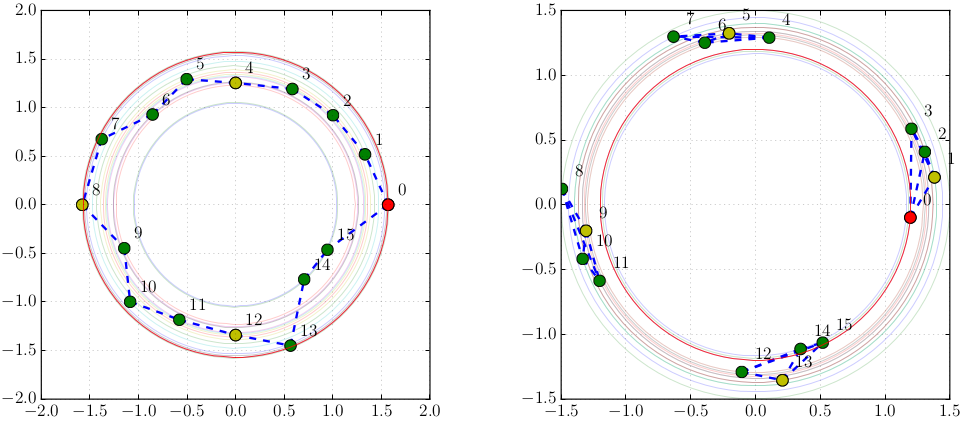
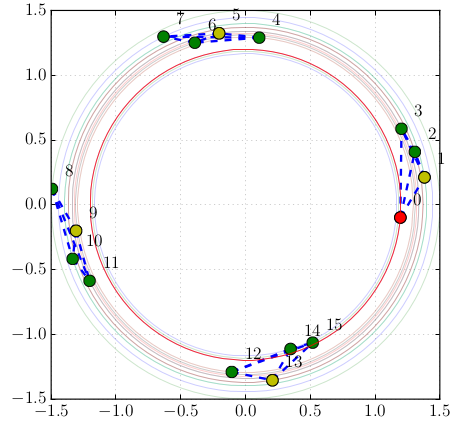
We consider a team of mobile robots with limited communication range tasked to coordinate in large environments. The robots need to maximize the covered area and achieve consensus in the presence of non-cooperative robots. Existing works in robot networks showed that a team can achieve resilient consensus by maintaining an $r$-robust communication network. However, the communication range of each robot needs to be large to satisfy the conditions of $r$-robustness. This paper relaxes this requirement on the communication range by leveraging the robot motion. Specifically, we design modular dynamic formations where subsets of robots move along simple closed curves. These modules can be linked together to assemble larger formations. We derive conditions based on periodic robot connections for individual and interconnected modules. We present module designs that satisfy the sufficient conditions in a lattice space. Simulations are provided to support our theoretical results.
L. Guerrero-Bonilla,
D. Saldaña, and
V. Kumar
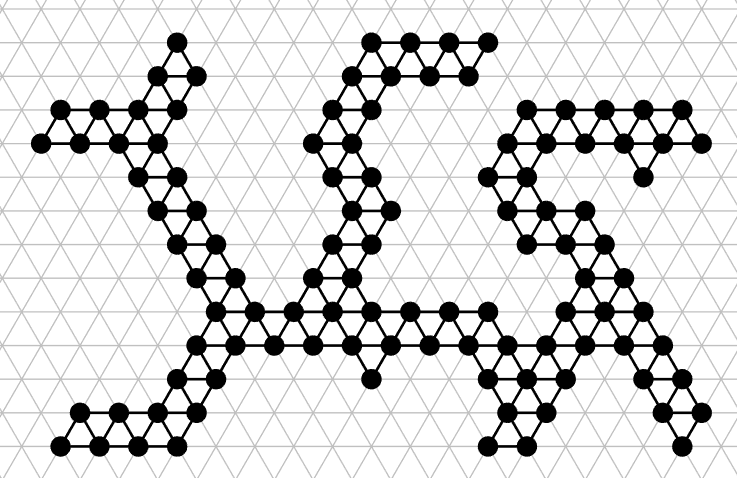
"Dense r-robust formations on lattices"
ICRA 2020 - IEEE International Conference on Robotics and Automation.
Abstract
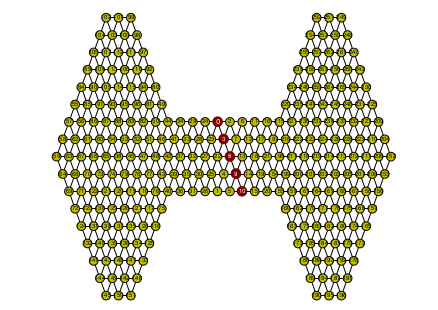
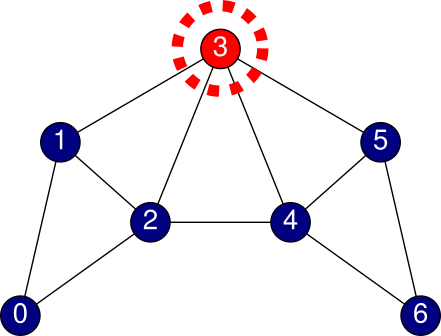
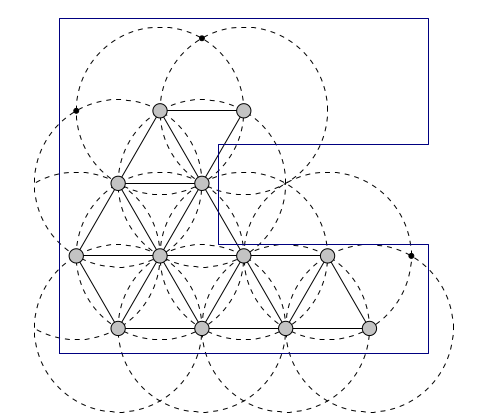
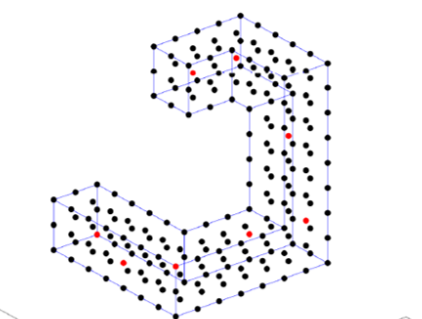
Robot networks are susceptible to fail under the presence of malicious or defective robots. Resilient networks in the literature require high connectivity and large communication ranges, leading to high energy consumption in the communication network. This paper presents robot formations with guaranteed resiliency that use smaller communication ranges than previous results in the literature. The formations can be built on triangular and square lattices in the plane, and cubic lattices in the three-dimensional space. We support our theoretical framework with simulations.
G. Li,
B. Gabrich,
D. Saldaña,
J. Das,
V. Kumar, and
M. Yim
"ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor"
ICRA'2019 - IEEE International Conference on Robotics and Automation.
Abstract
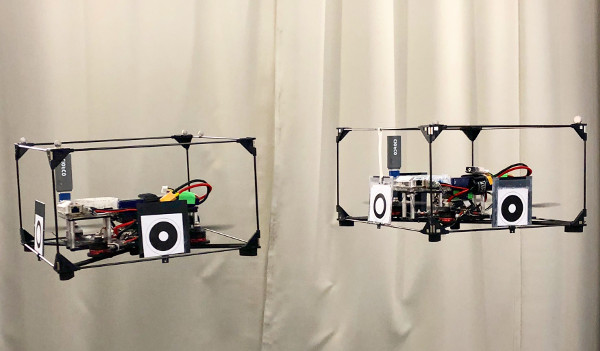
Flying modular robots have the potential to rapidly form temporary structures. In the literature, docking actions rely on external systems and indoor infrastructures for relative pose estimation. In contrast to related work, we provide local estimation during the self-assembly process to avoid dependency on external systems. In this paper, we introduce ModQuad-Vi, a flying modular robot that is aimed to operate in outdoor environments. We propose a new robot design and vision-based docking method. Our design is based on a quadrotor platform with onboard computation and visual perception. Our vision-based control method is able to accurately align modules for docking actions. Additionally, we present the dynamics and a geometric controller for the aerial modular system. Experiments validate the vision-based docking method with successful results.
D. Saldaña,
B. Gabrich,
G. Li,
M. Yim, and
V. Kumar
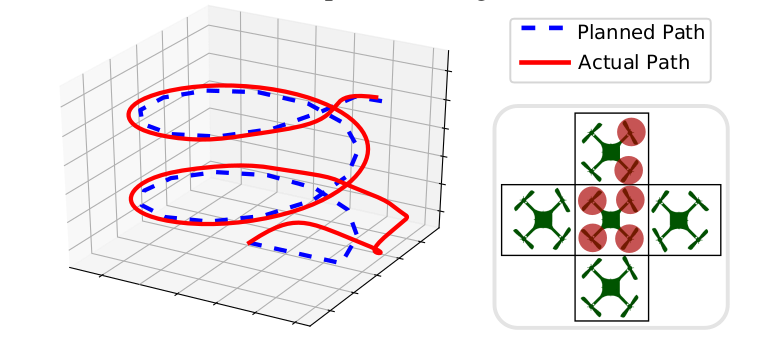
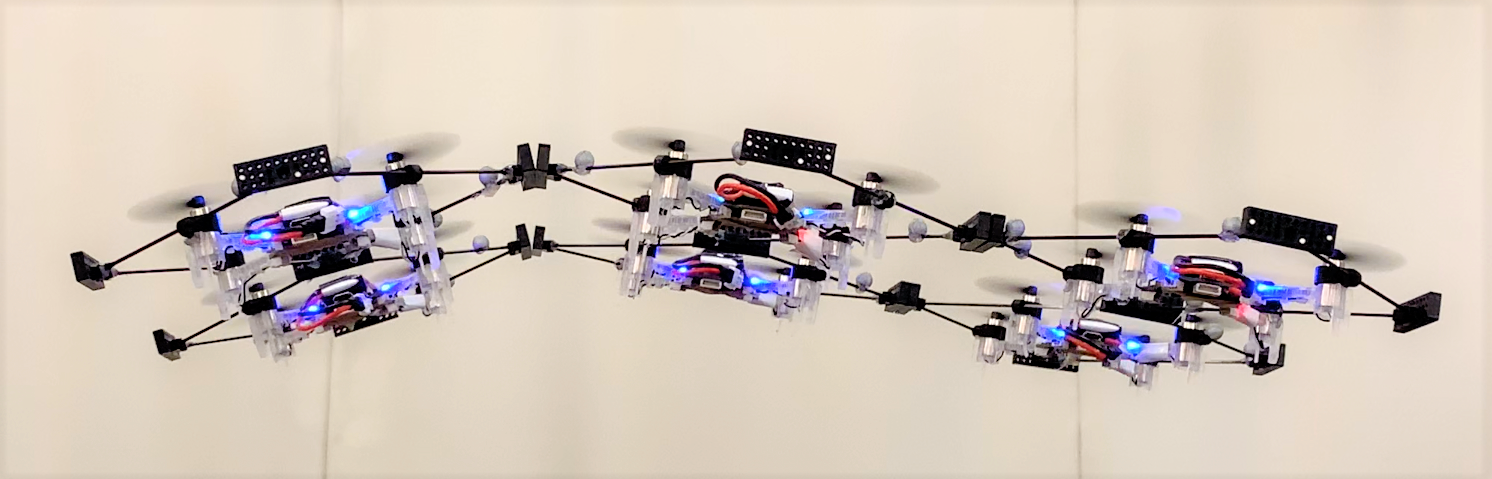
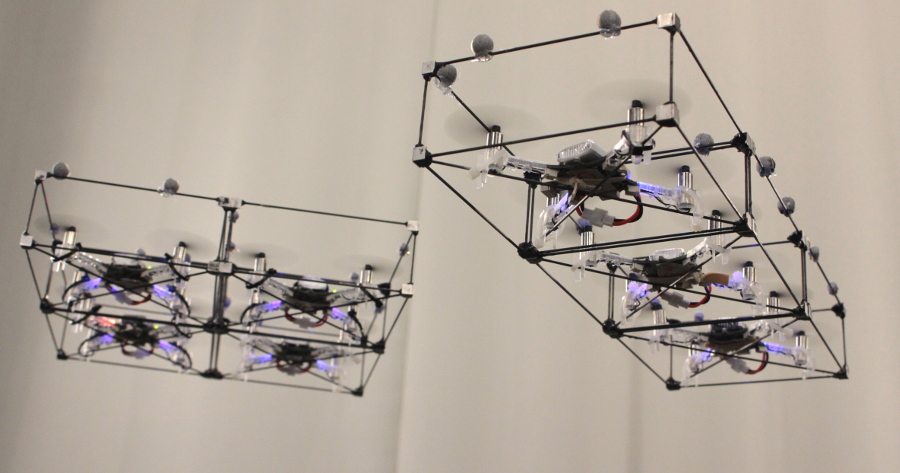
"ModQuad: The Flying Modular Structure that Self-Assembles in Midair"
ICRA'2018 - IEEE International Conference on Robotics and Automation.
Abstract
We introduce ModQuad, a novel flying modular robotic structure that is able to self-assemble in midair and cooperatively fly. The structure is composed by agile flying modules that can easily move in a three dimensional environment. The module is based on a quadrotor platform within a cuboid frame which allows it to attach to other modules by matching vertical faces. Using this mechanism, a ModQuad swarm is able to rapidly assemble flying structures in midair using the robot bodies as building units. In this paper, we focus on two important tasks for modular flying structures. First, we propose a decentralized modular attitude controller to allow a team of physically connected modules to fly cooperatively. Second, we develop a docking method that drives pairs of structures to be attached in midair. Our method precisely aligns, and corrects motion errors during the docking process. In our experiments, we tested and analyzed the performance of the cooperative flying method for multiple configurations. We also tested the docking method with successful results.

B. Gabrich,
D. Saldaña,
M. Yim, and
V. Kumar
"A Flying Gripper Based on Cuboid Modular Robots"
ICRA'2018 - IEEE International Conference on Robotics and Automation.
Abstract
We present a novel flying modular platform capable of grasping and transporting objects. It is composed of four cooperative identical modules where each is based on a quadrotor within a cuboid frame with a docking mechanism. Pairs of modules are able to fly independently and physically connect by matching their vertical edges forming a hinge. Four one degree of freedom (DOF) connections results in a one DOF four-bar linkage that can be used to grasp external objects. In this paper, we propose a decentralized method that allows the Flying Gripper to control its position, attitude and aperture angle. In our experiments, we tested the hovering performance for different aperture angles and with a grasped object. The performance for a closing and opening motion was also verified.
D. Saldaña,
R. Assunção,
M. Hsieh,
M.F.M. Campos, and
V. Kumar
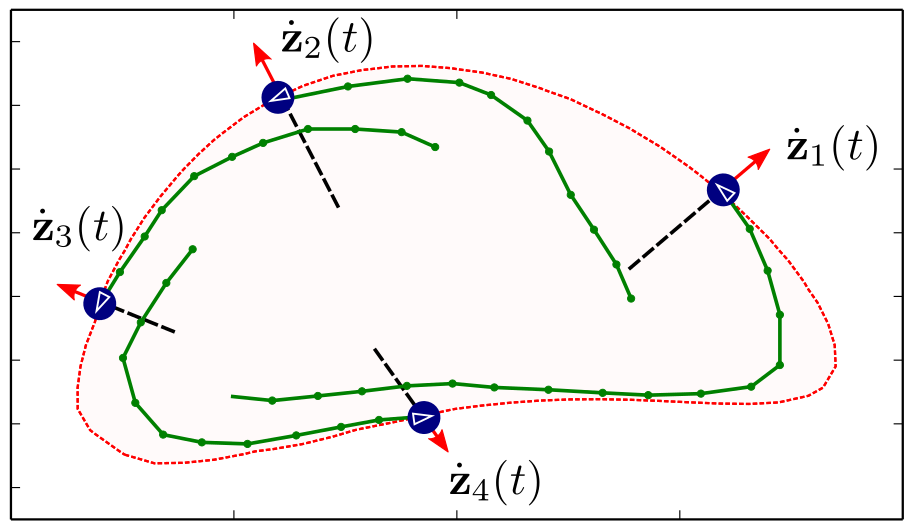
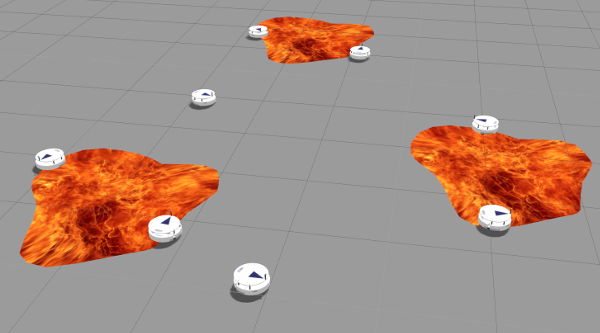
"Cooperative Prediction of Time-Varying Boundaries with a Team of Robots"
MRS'2017 - International Symposium on Multi-Robot and Multi-Agent Systems.
Abstract
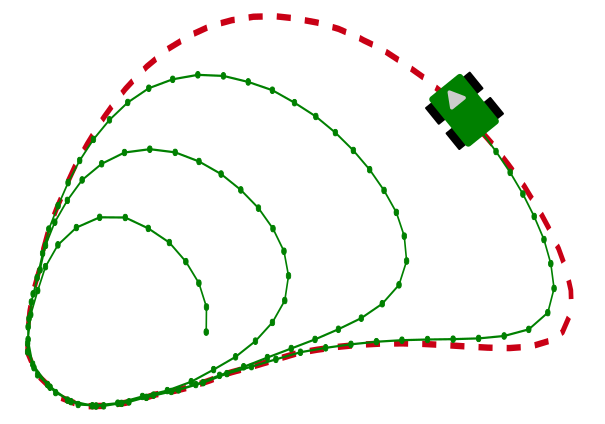
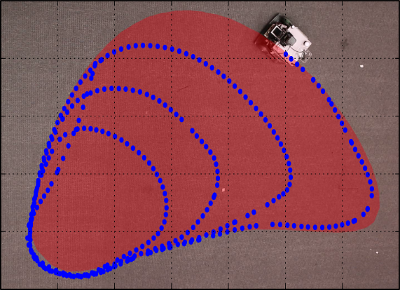
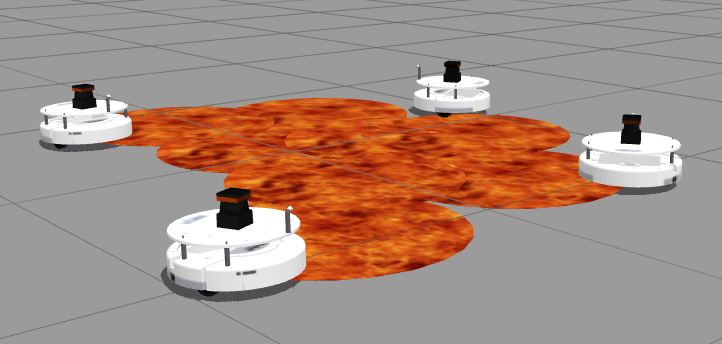
Environmental boundaries, such as the borderline of a forest fire or an oil spill, pose a significant threat for living organisms. Anticipating the dynamics of these phenomena is a potentially life-saving indicator to support efficient and effective evacuations or to dispel the hazard. We propose a decentralized coordination method that allows multiple robots to efficiently sample and predict the behavior of environmental boundaries. Our method does not require a priori information about the boundary dynamics. We validate our proposal through experiments with actual robots. We demonstrate experimentally that our method can estimate and predict non-convex boundaries even with noisy measurements and inaccurate motion actuators.

D. Saldaña,
B. Gabrich,
M. Whitzer,
A. Prorok,
M.F.M. Campos,
M. Yim, and
V. Kumar
"A Decentralized Algorithm for Assembling Structures with Modular Robots"
IROS'2017 - IEEE/RSJ International Conference on Intelligent Robots and Systems.
Abstract
Recent work in the field of bio-inspired robotic systems has introduced designs for modular robots that are able to assemble into structures (e.g., bridges, landing platforms, fences) using their bodies as the building components. Yet, it remains an open question as to how to program large swarms of robotic modules so that the assembly task is performed as efficiently as possible. Moreover, the problem of designing assembly algorithms is compounded by the scale of these systems, and by the lack of centralized guidance in unstructured environments. The main contribution of this work is a decentralized algorithm to assemble structures with modular robots. Importantly, we coordinate the robots so that docking actions can be parallelized. We show the correctness of our algorithm, and we demonstrate its scalability and generality through multiple scenarios in simulation. Experiments on physical robots demonstrate the validity of our approach in real-world settings.
D. Saldaña,
A. Prorok,
S. Sundaram,
M.F.M. Campos, and
V. Kumar
"Resilient Consensus for Time-Varying Networks of Dynamic Agents"
ACC'2017 - IEEE American Control Conference.
Abstract
We consider networks of dynamic agents that execute cooperative, distributed control algorithms in order to coordinate themselves and to collectively achieve goals. The agents rely on consensus algorithms that are based on local interactions with their nearest neighbors in the communication graph. However, such systems are not robust to one or more malicious agents and there are no performance guarantees when one or more agents do not cooperate. Recent results in network science deal with this problem by requiring specific graph topological properties. Nevertheless, the required network topologies imply high connectivity levels, which may be difficult to achieve in systems that exhibit time-varying communication graphs. In this paper, we propose an approach that provides resilience for networks of dynamic agents whose communication graphs are time-varying. We show that in the case where the required connectivity constraints cannot be satisfied at all times, we can resort to a consensus protocol that guarantees resilience when the union of communication graphs over a bounded period of time satisfies certain robustness properties. We propose a control policy to attain resilient behavior in the context of perimeter surveillance with a team of robots. We provide simulations that support our theoretical analyses.
A. Jahn,
R. Javanmard Alitappeh,
D. Saldaña,
A.G. Santos,
L. Pimenta, and
M.F.M. Campos
"Distributed Multi-Robot Coordination for Dynamic Perimeter Surveillance in Uncertain Environments"
ICRA'2017 - IEEE International Conference on Robotics and Automation.
Abstract
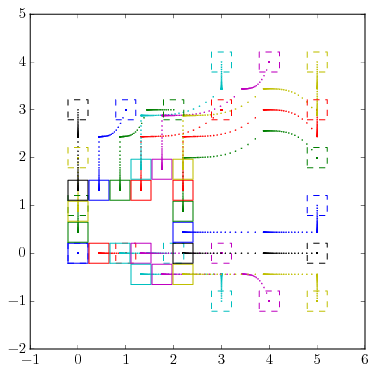
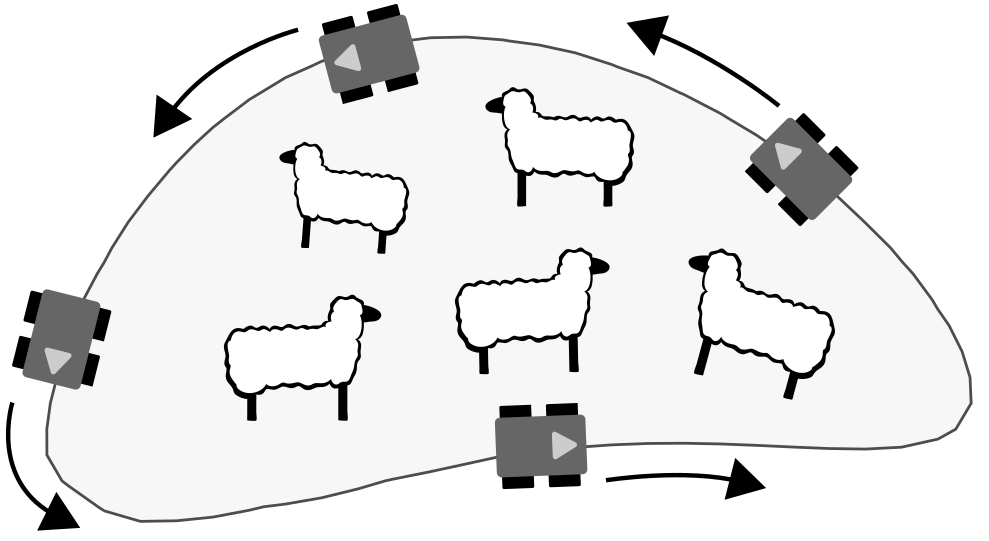
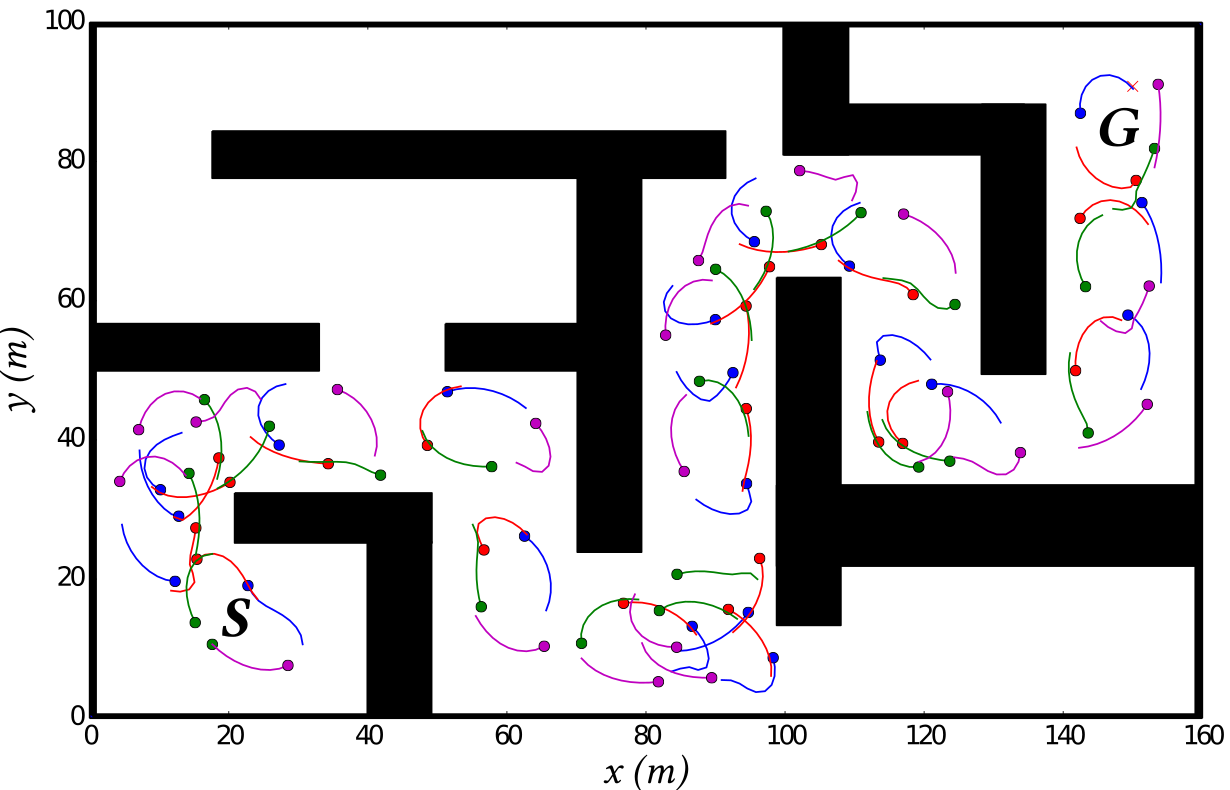
In perimeter surveillance, multiple robots circulate around the boundary of a desired region in order to create a virtual fence. The aim of the this fence is to avoid internal or external agents crossing through the delimited area. In this paper, we propose a distributed technique that allows a team of robots to plan the deformation of the boundary shape in order to escort the safe region from one place to a goal. Our proposal is composed of two parts. First, we present a distributed planning method for the dynamic boundary. We model the resulting plan as a twice differentiable function. Second, we use the obtained function to guide the robot team, where every member uses only local information for the controller. The robots distribute themselves along the time-varying perimeter and patrol around. We show in simulation how the robots behave in partially observable environments with static obstacles.
D. Saldaña,
R. Javanmard Alitappeh,
L. Pimenta,
R. Assunção, and
M.F.M. Campos
"Dynamic Perimeter Surveillance with a Team of Robots"
ICRA'2016 - IEEE International Conference on Robotics and Automation.
Abstract
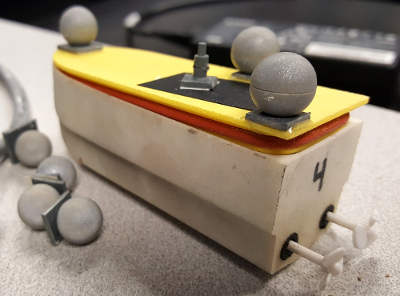
In this paper, we propose a motion planning method to escort a set of agents from one place to a goal in an environment with obstacles. The agents are distributed in a finite area, with a time-varying perimeter, in which we put multiple robots to patrol around it with a desired velocity. Our proposal is composed of two parts. The first one generates a plan to move and deform the perimeter smoothly, and as a result, we obtain a twice differentiable boundary function. The second part uses the boundary function to compute a trajectory for each robot, we obtain each resultant trajectory by first solving a differential equation. After receiving the boundary function, the robots do not need to communicate among themselves until they finish their trajectories. We validate our proposal with simulations and experiments with actual robots.
D. Saldaña,
R. Assunção, and
M.F.M. Campos
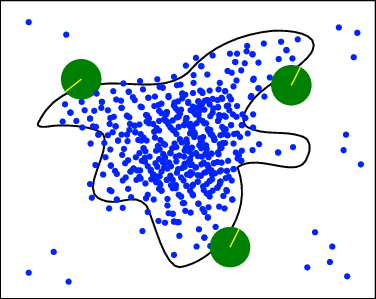
"A Distributed Multi-Robot Approach for the Detection and Tracking of Multiple Dynamic Anomalies"
ICRA'2015 - IEEE International Conference on Robotics and Automation.

Abstract
In many cases, large area disasters could be possibly be prevented if the incipient small-scale anomalies are detected in their early stages. A way to accomplish this would be to have multiple sensors deployed in disaster prone areas to detect anomalies. However, compared to static sensor networks, robotic sensor networks offer advantages such as active sensing, large area coverage and anomaly tracking. This paper addresses the problem of coordinating and controlling multiple robots for the detection of multiple dynamic anomalies in the environment. The main contribution of the work is a combined approach for the effective exploration under uncertainty, the anomaly tracking, and the autonomous on-line allocation of agents. Robots explore the work area maintaining the history of the sensed areas to reduce redundancy and to allow for full-map coverage. When an anomaly is detected, a robot autonomously determines how to either track the anomaly or to continue the exploration of the environment, depending on the size of the anomaly, which is estimated by the length of the perimeter of the enclosing polygon. We show results of our methodology both in simulation and with actual robots which have demonstrated that robots can autonomously and distributively be allocated to track or to explore depending on the behavior of the detected anomalies.

D. Saldaña,
R. Melo,
E. R. Nascimento, and
M.F.M. Campos
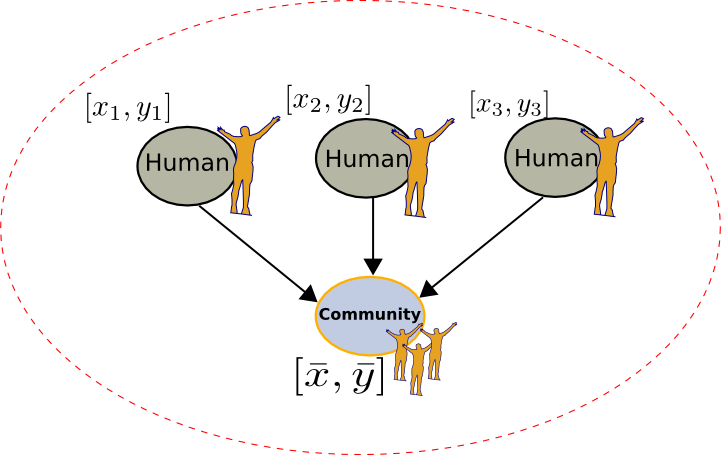
"Detecting Latent Variables of Interest in Geo-localized Environments Using an Aerial Robot"
LARS'2015 - 12th Latin American Robotics Symposium.
Abstract
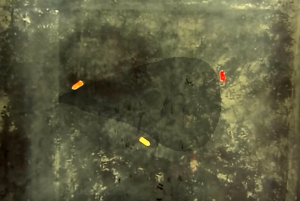
In general, monitoring applications require human intervention whenever there is no physical sensors for the variables of interest (e.g. People in danger after a catastrophe). In this paper we describe an inference engine which is used to estimate latent variables that can not be perceived by sampling the physical phenomena directly. Our approach uses information from different types of sensors, and fuses them along with knowledge of experts. The inference engine works with probabilistic first order logic rules based on geo-located sensed data as evidences in order to dynamically create the structure of a Bayesian network. Our experiments, performed by using an aerial robot with a mounted RGB-Camera, show the capability of our method to detect people in danger situations, where the physical variables to being sensed are humans and fire.
D. Saldaña,
L. Chaimowicz, and
M.F.M. Campos
"Searching and Tracking Anomalies with Multiple Robots: A Probabilistic Approach"
LARS'2014 - 11th Latin American Robotics Symposium.
Abstract
Real-time monitoring is paramount in environments where disasters may occur at any moment and when human or animal lives are in danger. Disasters usually are initiated by anomalies which were not timely detected and possibly corrected or even reported. In most cases it would be highly desirable to not only detect, but also to identify the affected area, whose perimeter may change over time. A typical example is the monitoring of a flammable forest, where the identification of increase in temperature, possibly due to fire is of utmost importance, but being able to determine the affected area in real time is also of great relevance to the firefighters. Similarly, detecting and tracking anomalies is an important task in several domains such as: oil spills in the water bodies, radiation leaks in nuclear power plants, and algae bloom in lakes.
D. Saldaña,
D. Ovalle, and
A. Montoya
"Improved algorithm for perimeter tracking in robotic sensor networks"
CLEI'2012 - XXXVIII Latin American informatics and computer science conference. , pp. 1-7..
D. Saldaña,
D. Ovalle, and
A. Montoya
"A multi-agent model to control robotic sensor networks"
CCC'2012 - 7th Colombian Computing Conference.
D. Saldaña,
D. Ovalle, and
A. Montoya
"MobSim: Una plataforma de desarrollo para Redes de Sensores Robóticas"
CCC'2011 - 6th Colombian Computing Conference.
D. Saldaña,
D. Ovalle, and
A. Montoya
"Modelo Multi-Agente para la Coordinación de Preferencias de Usuarios en Ambientes Inteligentes"
CCC'2010 - 5th Colombian Computing Conference.
D. Saldaña,
D. Ovalle, and
A. Montoya
"BlueContext: Sistema Multi-Agente para el Uso de Servicios Ubicuos a Través de Redes Bluetooth"
COMTEL'2010 - Congreso Internacional de Computación y Telecomunicaciones.
D. Saldaña,
D. Ovalle, and
A. Montoya
"Building Ubuquitous Context-Sensitive Services Using Mobile Agents Through Wireless Networks"
LATINCOM'2009 - IEEE Latin-American Conference on Communications.
J. Atencio,
C. Correa,
D. Saldaña, and
D. Aristizabal
"Mecanismo para monitoreo de cultivos y agricultura de precisión usando redes de sensores inalámbricos"
2008 - Congreso Nacional de Ingeniería Agrícola y Áreas Afines..